Métodos Numéricos
Elena E. Álvarez Saiz
Red Educativa Digital Descartes.
Universidad de Cantabria
Título de la obra:
MÉTODOS NUMÉRICOS
Autores:
Elena E. Alvarez Saiz
Diseño del libro: Juan Guillermo Rivera Berrío
Código JavaScript para el libro: Joel Espinosa Longi, IMATE, UNAM.
Recursos interactivos: DescartesJS
Fuentes: Lato y UbuntuMono
Fórmulas matemáticas: $\KaTeX$
Primera Edición
LICENCIA
 Creative Commons Attribution License 4.0.
Creative Commons Attribution License 4.0.
Tabla de contenido
Integración numérica
Introducción
En este capítulo nos dedicaremos a encontrar una aproximación de la integral $\int\limits_a^b {f\left( x \right)dx} $ cuando $f$ es una función integrable en $[a,b]$. Analizaremos también el error que se comete en la aproximación y cómo obtener su valor con una precisión dada.
Este problema se plantea por varias razones:
- La posibilidad de aplicar la Regla de Barrow se restringe a una pequeña parte de funciones elementales que tienen primitivas también elementales. Muchas funciones, como por ejemplo $e^{x^2}$ que es continua, no tienen primitiva elemental.
- Aunque existiera un procedimiento para encontrar la primitiva, llegar a ella puede resultar en muchos casos tedioso. Pensemos por ejemplo en las funciones racionales o en aquellas que requieren de cambios de variable más o menos ingeniosos.
- Por otro lado, en muchas aplicaciones sólo se tiene una tabla de valores de la función $f$ o la posibilidad de obtener su valor en un número finito de puntos.
Estas razones obligan a encontrar métodos alternativos para calcular el valor de una integral definida en un intervalo de forma aproximada. Por razones históricas, el cálculo aproximado de integrales se denomina cuadratura dejando la denominación de integración para la resolución de ecuaciones diferenciales.
Veremos en este tema otras fórmulas utilizando polinomios interpoladores.
Métodos habituales para obtener fórmulas de cuadratura
Si se considera un polinomio $p$ interpolador de $f$ en $n+1$ nodos, se tendría $$\left\{ {{x_i}} \right\}_{i = 0}^n \subset \left[ {a,b} \right]\,\,\,\,\,\,\,\,\,\,\,\,p\left( {{x_i}} \right) = f\left( {{x_i}} \right)\,\,i = 0,1,...,n$$
Una primera aproximación del valor de la integral de $f$ en $[a,b]$ podría ser $$\int\limits_a^b {f\left( x \right)dx} \approx \int\limits_a^b {p\left( x \right)dx} $$
Considerando el polinomio de interpolación de Lagrange, se tendrá que: $$p\left( x \right) = \sum\limits_{i = 0}^n {f\left( {{x_i}} \right){l_i}\left( x \right)} \,\,\,\, , \,\,\,\,\,\,\, {l_i}\left( x \right) = \prod\limits_{j = 0\,\,\,j \ne i}^n {{{x - {x_j}} \over {{x_i} - {x_j}}}} \,\,\,\,\,\, 0 \le i \le n$$
y, por lo tanto, $$\int\limits_a^b {p\left( x \right)dx} = \sum\limits_{i = 0}^n {f\left( {{x_i}} \right)\int\limits_a^b {{l_i}\left( x \right)dx} } = $$ $$ = \left( {b - a} \right)\sum\limits_{i = 0}^n {f\left( {{x_i}} \right)\underbrace {\left( {{1 \over {b - a}}\int\limits_a^b {{l_i}\left( x \right)dx} } \right)}_{{w_i}}} $$
Este tipo de cuadratura se dice que es una fórmula interpolatoria. Los puntos ${w_i}$ se denominan pesos y los puntos ${x_i}$ son los nodos de la fórmula de cuadratura.
Vamos a ver en este tema cómo obtener estos pesos de forma más sencilla.
Para ello se divide el intervalo $[a,b]$ en $k$ subintervalos $$a = {\alpha _o} < {\alpha _1} < ... < {\alpha _n} = b$$ obteniendo la siguiente aproximación $$\int\limits_a^b {f\left( x \right)dx} = \sum\limits_{i = 1}^k {\int\limits_{{\alpha _{i - 1}}}^{{\alpha _i}} {f\left( x \right)dx} } $$
Posteriormente se aplica la fórmula de cuadratura a cada subintervalo. Este tipo de fórmulas se denominan de cuadratura compuesta y se analizan en el apartado 1.4.
Para calcular la calidad de una fórmula de cuadratura se define su grado de precisión o exactitud.
Veremos en primer lugar cómo obtener fórmulas de cuadratura elementales y el error asociado limitándonos a las fórmulas de Newton-Cotes. Posteriormente veremos cómo construir fórmulas de cuadratura compuesta para aproximar la integral con un error inferior a la precisión dada.
Fórmulas de cuadratura de Newton-Cotes
Estas fórmulas de cuadratura son de tipo interpolatorio $$\int\limits_a^b {f\left( x \right)dx} \approx \left( {b - a} \right)\sum\limits_{i = 0}^n {{w_i}f\left( {{x_i}} \right)} \,\,\,\,\,\,\,\,\,\,\,\,\,{w_i} = {1 \over {b - a}}\int\limits_a^b {{l_i}\left( x \right)dx} $$ donde los nodos se toman equidistantes.
En la práctica resulta de utilidad el siguiente resultado.
Con los resultados expuestos anteriormente vamos a ver que la construcción de las fórmulas de Newton-Cotes no precisa calcular los polinomios base de Lagrange y luego realizar las integrales para obtener los correspondientes pesos.
Veamos cómo aplicar estos resultados para calcular las primeras fórmulas de Newton-Cotes.
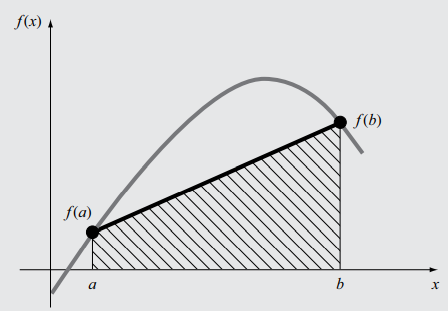
Primera fórmula de Newton-Cotes (n=1)
Consideramos dos nodos en el intervalo $[a,b]$, esto es, $x_0=a$ y $x_1=b$. La fórmula de cuadratura es $$\int\limits_a^b {f\left( x \right)dx} \approx \left( {b - a} \right)\left[ {{\omega _o}f\left( a \right) + {\omega _1}f\left( b \right)} \right]$$
Para calcular los pesos se considera el intervalo $[0,1]$ y se resuelve el sistema $$\begin{aligned} & k = 0\,\,\,\,\,\,\,\,\,&1 = \int\limits_0^1 {dx} = {\omega _o} + {\omega _1} \\ & k = 1\,\,\,\,\,\,\,\,\,&{1 \over 2} = \int\limits_0^1 {xdx} = {\omega _1} \end{aligned}$$
La solución del sistema es ${\omega _o} = {\omega _1} = {1 \over 2}$. Por lo tanto, $$\int\limits_a^b {f\left( x \right)dx} \approx {{b - a} \over 2}\left[ {f\left( a \right) + f\left( b \right)} \right]$$ Esta fórmula de Newton-Cotes de dos puntos se llama fórmula del trapecio.
Segunda fórmula de Newton-Cotes (n=2)
En este caso el número de nodos es 3: $x_o=a$, $x_1=\frac{a+b}{2}$ y $x_2=b$. La fórmula de cuadratura en este caso es $$\int\limits_a^b {f\left( x \right)dx} \approx \left( {b - a} \right)\left[ {{\omega _o}f\left( a \right) + {\omega _1}f\left( {{{a + b} \over 2}} \right) + {\omega _2}f\left( b \right)} \right]$$ Para determinar los nodos consideramos el intervalo $[-1,1]$. Resolviendo el sistema de 3 ecuaciones con 3 incógnicas, obtenemos ${\omega _o} = {\omega _2} = {1 \over 6}$, ${\omega _1} = {2 \over 3}$. Por lo tanto: $$\int\limits_a^b {f\left( x \right)dx} \approx {{\left( {b - a} \right)} \over 6}\left[ {f\left( a \right) + 4f\left( {{{a + b} \over 2}} \right) + f\left( b \right)} \right]$$
Esta regla se llama regla de Simpson.

Fórmula de Newton-Cotes con n=3
En este caso el número de nodos es 4: $x_0=a$, $x_1=a+\frac{b-a}{3}$, $x_2=a+2 \frac{b-a}{3}$ y $x_3=b$. La fórmula de cuadratura es $$\int\limits_a^b {f\left( x \right)dx} \approx \left( {b - a} \right)\left[ {{\omega _o}f\left( a \right) + {\omega _1}f\left( { {{2a+b} \over 3}} \right) + } \right.{\rm{ }}$$ $$\left. +{{\omega _2}f\left( {{{a+2b} \over 3}} \right) + {\omega _3}f\left( b \right)} \right]$$ Para determinar los nodos consideramos el intervalo $[0,3]$ y se resuelve el sistema de 4 ecuaciones con 4 incógnitas asociado, obteniendo ${\omega _o} = {\omega _3} = {1 \over 8}$, ${\omega _1} = {\omega _2} = {3 \over 8}$ Por lo tanto: $$\int\limits_a^b {f\left( x \right)dx} \approx $$ $$ \approx {{\left( {b - a} \right)} \over 8}\left[ {f\left( a \right) + 3f\left( {{{2a + b} \over 3}} \right) + 3f\left( {{{a + 2b} \over 3}} \right) + f\left( b \right)} \right] $$ Esta fórmula se llama regla de los tres octavos.
De forma análoga pueden obtenerse las siguientes fórmulas de Newton-Cotes.
Error en la fórmula de cuadratura de Newton-Cotes.
Vamos a analizar en este apartado el error de las fórmulas de cuadratura de Newton-Cotes. El error de la aproximación es la diferencia entre el valor exacto y el aproximado, es decir: $$E = \int\limits_a^b {f\left( x \right)dx} - \left( {b - a} \right)\sum\limits_{j = 0}^n {{\omega _j}f\left( {{x_j}} \right)} $$ El siguiente resultado nos da una expresión para este error.
Error en la fórmula del trapecio ($n=1$)
Consideremos la fórmula de Newton-Cotes para $n=1$, que es impar. Tomamos $m=n+1=2$. Se tiene que $$\begin{aligned} E=&\color{red}{\int\limits_a^b {f\left( x \right)dx}} \color{black}{-} \color{green}{{{b - a} \over 2}\left( {f\left( a \right) + f\left( b \right)} \right)} \\ E=&{C_1} h^3 f''\left( \xi \right) \end{aligned}$$ Para determinar $C_1$, consideramos la función $f(x)=(x-a)^m=(x-a)^2$. Para esta función se tiene que por un lado se cumple $$\color{red}{\int\limits_a^b {f(x)dx}} \color{black}{=\int\limits_a^b {{(x-a)^2}dx} = {1 \over 3}{\left( {b - a} \right)^3} =} \color{red}{{ {h^3} \over 3}}$$ y por otro $$\color{green}{{{b - a} \over 2}\left( {f\left( a \right) + f\left( b \right)} \right)} \color{black}{= {{b - a} \over 2}\left( {0 + {{\left( {b - a} \right)}^2}} \right) =} {{{{\left( {b - a} \right)}^3}} \over 2} = \color{green}{ \frac {h^3} {2}}$$ Por lo tanto, $${C_1}{h^3}{f^{''}}\left( \xi \right) = {{{h^3}} \over 3} - {{h^3} \over 2}$$es decir, $$2 {C_1} = {1 \over 3} - {1 \over 2} = - {1 \over 6}$$ $${C_1} = - {1 \over 12}$$
Error en la fórmula de Simpson
Consideremos la fórmula de Newton-Cotes para $n=2$ que es par, consideramos $m=n+2=4$. Se tiene que $$\begin{aligned} E=&\int\limits_a^b {f\left( x \right)dx} - {{{b - a} \over 6}\left[ {f\left( a \right) + 4f\left( {{{a + b} \over 2}} \right) + f\left( b \right)} \right]} \\ E=&{C_2} h^5 f''\left( \xi \right) \end{aligned}$$ Para determinar $C_2$ consideramos la función $f(x)=(x-a)^m=(x-a)^4 $. Se tiene que por un lado se cumple $$\int\limits_a^b {{(x-a)^4}dx} = {1 \over 5}{\left( {b - a} \right)^5} = { {(2h)^5} \over 5}$$ y por otro $${{b - a} \over 6}\left[ {0 + 4\, \cdot {h^4} + {(2h)^4}} \right] = {{2h^5} \over 6} \cdot 20$$
Error en la fórmula de cuadratura 3/8
Consideremos la fórmula de Newton-Cotes para $n=3$, que es impar. Tomamos $m=n+1=4$. Se tiene que $$E=\int\limits_a^b {f\left( x \right)dx} - $$ $${{\left( {b - a} \right)} \over 8}\left[ {f\left( a \right) + 3f\left( {{{2a + b} \over 3}} \right) + 3f\left( {{{a + 2b} \over 3}} \right) + f\left( b \right)} \right] $$
Para determinar $C_3$ se considera la función $f(x)=(x-a)^m=(x-a)^4$. Se cumplirá $$\int\limits_a^b {{(x-a)^4}dx} = {1 \over 5}{\left( {b - a} \right)^5} = { {(3h)^5} \over 5}$$ $${{3h} \over 8}\left[ 0 + 3\, \cdot {h^4} + 3\, \cdot (2h)^4 + (3h)^4 \right] = {{99h^5} \over 2} $$ Por lo tanto, $$E={C_3} h^5 f^{(4}\left( \xi \right)=\frac{-9}{10}h^5$$ $$4!{C_3} = {{ - 9} \over {10}}\,\,\,\,\,\, \Rightarrow \,\,\,{C_3} = - {3 \over {80}}$$
En la siguiente imagen se muestra la expresión del resto para cada una de las fórmulas de Newton-Cotes vistas anteriormente.
Vemos que, en el caso de la fórmula de los trapecios, el error que se comete en la aproximación depende del cubo de la longitud del intervalo. Si se disminuye esta longitud, el error disminuye rápidamente. Eso se puede lograr dividiendo el intervalo en subintervalos, y aplicando la cuadratura a cada uno de ellos y sumando después los resultados obtenidos.
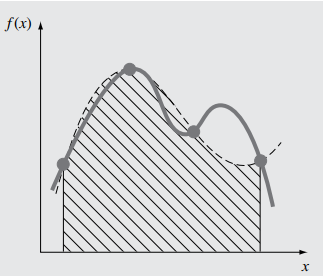
Fórmulas compuestas. Métodos adaptativos
Cuando la distancia entre los nodos $h$ es de longitud grande, mayor que 1, el error que se comete puede ser grande. Por ello, cuando el intervalo $[a,b]$ es grande se divide el intervalo $[a,b]$ en $N$ subintervalos $$a = {\alpha _o} < {\alpha _1} < ... < {\alpha _N} = b$$ y se calcula $$\int\limits_a^b {f\left( x \right)dx} = \sum\limits_{i = 1}^N {\int\limits_{{\alpha _{i - 1}}}^{{\alpha _i}} {f\left( x \right)dx} } $$ aplicando la fórmula de cuadratura a cada uno de los subintervalos $[{\alpha _{i-1}},{\alpha _i}]$.
Dependiendo de la función, puede ser conveniente utilizando subintervalos más pequeños donde haya más variabilidad de la función. En estos métodos adaptativos se estima el error cometido en cada intervalo de forma que permita decidir si hay que subdividir el intervalo.
Se calcula la aproximación $I_1$ de la integral de $f$ en $[a,b]$ mediante la cuadratura de los trapecios en el intervalo $[a,b]$.
Por otro lado, se considera $I_2$ la aproximación de la integral utilizando la regla del trapecio compuesta con $N=2$ siendo $ \color{red}{E}$ el error de esta aproximación.
Se tendrá:
$$\int\limits_a^b {f\left( x \right)dx} = I_1 - {\color{blue}{\frac{(b-a)^3}{12} f''(\xi _1)}}$$ $$\int\limits_a^b {f\left( x \right)dx} = I_2 {\color{red}{-\frac{(b-a)^3}{12 \cdot 4} f''(\xi _2)}}=I_2+ {\color{red}{E}}$$ Si suponemos que $f''(\xi _1)\approx f''(\xi _2)$, restando las dos expresiones anteriores, podemos considerar que una estimación del error utilizando el método de los trapecios en dos subintervalos $$\left|I_2-I_1\right| \approx \left | \color{red}{E}-\color{blue}{4E} \right|= \left |3E\right|$$ $$\color{red}{\left |E\right|=\left |\int\limits_a^b {f\left( x \right)dx} - I_2\right|\approx \left |\frac{1}{3}(I_2-I_1)\right|}$$Teniendo en cuenta la estimación anterior del error, el método recursivo para calcular la integral consiste en aplicar lo siguiente,
- Si la estimación del error es menor que la tolerancia, devolvemos el valor de $I_2$ con la estimación del error.
- Si esta estimación del error es mayor que la tolerancia, repetimos el proceso en cada subintervalo $[a, \frac{a+b}{2}$ y $[\frac{a+b}{2},b]$ permitiendo en cada subintervalo solo la mitad de la tolerancia.
Llamando $I_1$ a la fórmula de cuadratura de Simpson en $[a,b]$ y llamando $I_2$ a la fórmula de cuadratura de Simpson compuesta con $N=2$, se tendrá, llamando $h=(b-a)/2$
$$\int\limits_a^b {f\left( x \right)dx} = I_1 -{\color{blue}{ \frac{h^5}{90 } f''(\xi _1)}}$$ $$\int\limits_a^b {f\left( x \right)dx} = I_2 - {\color{red}{\frac{h^5}{90 \cdot 2^4 } f''(\xi _2)}}=I_2+\color{red}{E}$$ Si suponemos que $f''(\xi _1)\approx f''(\xi _2)$, restando las dos expresiones anteriores, podemos considerar que una estimación del error utilizando el método de Simpson en dos subintervalos $$\left|I_2-I_1\right| \approx \left |E-16E \right|= \left |15E\right|$$Teniendo en cuenta la estimación anterior del error, el método recursivo para calcular la integral consiste en aplicar lo siguiente,
- Si esta estimación del error es menor que la tolerancia, devolvemos el valor de $I_2$ con la estimación del error.
- Si esta estimación del error es mayor que la tolerancia, repetimos el proceso en cada subintervalo $[a, \frac{a+b}{2}$ y $[(\frac{a+b}{2},b]$ permitiendo en cada subintervalo solo la mitad de la tolerancia.
Ejercicio Calcular la siguiente integral $\int\limits_0^\pi {{e^{{\rm{sen}}x\cos x}}\,dx} \,$ con un error inferior a $10^{-12}$.
Ejercicio Calcular la siguiente integral $\int\limits_0^4 {{e^{ - {x^2}}}dx} $ con un error inferior a $10^{-12}$.
Ejercicio Calcular la siguiente integral $\int\limits_0^4 {{e^{{x^2}}}dx} $ con un error inferior a $10^{-6}$.
Veamos cómo encontrar una estimación del error cuando se utiliza una fórmula de Newton-Cotes considerando dos pasos diferentes $h$ y $h/2$ y una estrategia para aplicar este método adaptativo en general.
Si llamamos $I$ a la aproximación de la integral $$\int\limits_a^b {f\left( x \right)dx} = I + E \,\,\, \text{con} \,\,E = {C_n}{h^{m + 1}}{f^{(m}}\left( \xi \right)$$ siendo $$m = \left\{ \begin{aligned} &n + 1\,\,si\,\,n\,\,impar \\ &n + 2\,\,si\,\,n\,\,par \\ \end{aligned} \right.$$
Aplicando la misma fórmula a los intervalos $[a,\frac{a+b}{2}]$ y $[\frac{a+b}{2},b]$ se tendrá, $$\begin{aligned} \int\limits_a^{\frac {a+b}{2}} {f\left( x \right)dx} &= {I_1} + {E_1} = {I_1} + {C_n}{\left( {{h \over 2}} \right)^{m + 1}}{f^{(m}}\left( {{\xi _1}} \right)\\ & {\xi _1} \in \left[ {a,{{a + b} \over 2}} \right] \end{aligned}$$ $$\begin{aligned} \int\limits_{{{a + b} \over 2}}^b {f\left( x \right)dx} &= {I_2} + {E_2} = {I_2} + {C_n}{\left( {{h \over 2}} \right)^{m + 1}}{f^{(m}}\left( {{\xi _2}} \right)\\ &{\xi _2} \in \left[ {{{a + b} \over 2},b} \right] \end{aligned}$$
Si $[a,b]$ es pequeño, $$I + E{\mkern 1mu} {\mkern 1mu} = {I_1} + {I_2} + {C_n}{{{h^{m + 1}}} \over {{2^m}}}\left[ {{{{f^{(m}}\left( {{\xi _1}} \right) + {f^{(m}}\left( {{\xi _2}} \right)} \over 2}} \right]$$ dado que el intervalo es pequeño, $$I + E{\mkern 1mu} {\mkern 1mu} \approx {I_1} + {I_2} + \underbrace {{C_n}{{{h^{m + 1}}} \over {{2^m}}}{f^{(m}}\left( \xi \right)}_{E/{2^m}}$$ $$I + E \approx {I_1} + {I_2} + {E \over {{2^m}}}$$ $${{{2^m} - 1} \over {{2^m}}}E \approx {I_1} + {I_2} - I$$ $$E \approx {{{2^m}} \over {{2^{m}-1}}}\left( {{I_1} + {I_2} - I} \right)$$
Por lo tanto, fijada una precisión $\epsilon$ deseada de la integral, se describe la estrategia para obtener la aproximación con la precisión deseada.
- Elegimos una fórmula de Newton-Cotes para aproximar la integral en $[a,b]$.
- Subdividimos el intervalo $[a,b]$ en dos subintervalos de la misma longitud y calculamos las aproximaciones de las integrales $I_1$ e $I_2$ en ambos intervalos, con las correspondientes estimaciones de los errores $E_1$ y $E_2$. Definimos los vectores $I=[I_1, \,\,I_2]$ y $E=[E_1, \,\,E_2]$
- Si la suma de los errores, sum(E), es inferior a $\epsilon$, tomamos la suma de las aproximaciones $I$ como valor aproximado de la integral y se habrá terminado. Si no es así, $sum(E) \ge \epsilon$, entonces vamos al paso siguiente.
- Buscamos el error $E_k$ más grande de los contenidos en el vector $E$. Subdividimos el intervalo asociado a $E_k$ en dos mitades y calculamos las aproximaciones de la integral en cada una de las mitades y los correspondientes errores. Eliminamos $I_k$ y $E_k$ y ponemos en su lugar los dos valores de la integral calculados y los correspondientes errores. Volvemos al paso 3.
%Devuelve una estimación de la integral y
%el error cometido. Requiere que la
%función f se programe vectorialmente.
format long
f=@(x) exp(sin(x).*cos(x));
error=10^-12;
[i1 e1]=iehardy(x(1),x(2),f);
[i2 e2]=iehardy(x(2),x(3),f);
E=[e1 e2];I=[i1 i2];
error=sum(E)
itg=sum(I)
x=[x(1:k) xn x(k+1:end)];
[i1 e1]=iehardy(x(k),xn,f);
[i2 e2]=iehardy(xn,x(k+2),f);
E=[E(1:k-1) e1 e2 E(k+1:end)]
I=[I(1:k-1) i1 i2 I(k+1:end)];
itg=sum(I)
error=sum(E)
Usualmente, si la integral es un número grande, el algoritmo se detiene cuando el error relativo es inferior a $\epsilon_r$, mientras que si $|I|$ es pequeño, el algoritmo finaliza cuando el error absoluto es inferior a $\epsilon_a$.
%er error relativo
x=[a (a+b)/2 b]
[i1 e1]=iehardy(x(1),x(2),f)
[i2 e2]=iehardy(x(2),x(3),f)
I=[i1 i2];E=[e1 e2];
error=sum(E);
if error<ea
itg=sum(I);
[itg error]
else
[s,k]=max(E)
end
parar=0
while parar==0
xn=(x(k)+x(k+1))/2
x=[x(1:k) xn x(k+1:end)]
[i1 e1]=iehardy(x(k),xn,f);
[i2 e2]=iehardy(xn,x(k+2),f);
E=[E(1:k-1) e1 e2 E(k+1:end)];
I=[I(1:k-1) i1 i2 I(k+1:end)];
error=sum(E);
if error < ea+er*abs(itg)
itg=sum(I);
[itg error]
parar=1;
else
[s,k]=max(E);
end
end
Cálculo de Integrales impropias
En este apartado, veremos cómo proceder cuando el intervalo $[a,b]$ no es acotado. En el primer apoartado analizaremos el caso en el que $a$ o $b$ o ambos no son finitos (integrales impropias de primera especie) y en el segundo apartado cuando $f$ tenga una singularidad en un punto $x_o$ en $[a,b]$ de forma que se cumple $\mathop {\lim }\limits_{x \to {x_o}} \left| {f\left( x \right)} \right| = + \infty $ (integrales impropias de segunda especie).
Integrales impropias de primera especie
Consideraremos en este caso integrales del tipo $$\int\limits_a^\infty {f\left( x \right)dx} = \mathop {\lim }\limits_{b \to \infty } \int\limits_a^b {f\left( x \right)dx} $$ donde $f$ es continua. Cuando el límite anterior existe, la integral impropia es convergente. En este caso se tendrá que $$\mathop {\lim }\limits_{b \to \infty } \int\limits_b^\infty {f\left( x \right)dx} = 0$$ En primer lugar se hallará un valor de $b$ de forma que $$\left| {\int\limits_b^\infty {f\left( x \right)dx} } \right| < {\varepsilon \over 2}$$y luego se buscará una aproximación de la intengral $Itg$ de forma que $$\left| {\int\limits_a^b {f\left( x \right)dx} - Itg} \right| < {\varepsilon \over 2}$$ De forma análoga se podrá calcular las integrales $${\int\limits_{ - \infty }^a {f\left( x \right)dx} }$$
En el caso de una integral de la forma $${\int\limits_{ - \infty }^\infty {f\left( x \right)dx} }$$ se tendrá en cuenta que $$\int\limits_{ - \infty }^\infty {f\left( x \right)dx} = \int\limits_{ - \infty }^0 {f\left( x \right)dx} + \int\limits_0^\infty {f\left( x \right)dx} $$ buscando una aproximación de cada una de ellas con un error menor que $\epsilon/2$. Alternativamente se puede buscar números $a<0$ y $b>0$ de forma que $$\left| {\int\limits_{ - \infty }^a {f\left( x \right)dx} } \right| < {\varepsilon \over 4}\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\left| {\int\limits_b^\infty {f\left( x \right)dx} } \right| < {\varepsilon \over 4}\,\,\,\,\,\,\,\,\,\left| {\int\limits_a^b {f\left( x \right)dx} } \right| < {\varepsilon \over 2}$$
Ejercicio Calcular $\int\limits_0^\infty {{e^{ - x}}{{\cos }^2}\left( x \right)dx} $ considerando $ea=10^{-12}$.
Ejercicio Calcular $\int\limits_0^\infty {{e^{ - x}}\log \left( {2 + {\rm{sen}}x} \right)dx} $ considerando $e_a=10^{-12}$.
Ejercicio Calcular $\int\limits_0^\infty {{e^{ - {x^4}}}dx} $ considerando $e_a=10^{-12}$.
Ejercicio Calcular $\int\limits_0^\infty {{{{\rm{sen}}x} \over {1 + {x^3}}}dx} $ considerando $e_a=10^{-12}$.
Ejercicio Calcular $\int\limits_0^\infty {{{{e^{ - x}}} \over {1 + {x^4}}}dx} $ considerando $e_a=10^{-12}$.
Integrales impropias de segunda especie
En este tipo de integrales la función $f$ es continua en $[a,b]$ salvo en un punto $x_0$ donde $$\mathop {\lim }\limits_{x \to {x_0}} \left| {f\left( x \right)} \right| = + \infty $$
Caso 1 Si el punto $x_0=a$ será $$\int\limits_a^b {f\left( x \right)dx} = \mathop {\lim }\limits_{\delta \searrow 0} \int\limits_{a + \delta }^a {f\left( x \right)dx} $$ Caso 2 Si el punto $x_0=b$ será $$\int\limits_a^b {f\left( x \right)dx} = \mathop {\lim }\limits_{\delta \searrow 0} \int\limits_a^{b - \delta } {f\left( x \right)dx} $$ Caso 3 Si $X_0$ es un punto interior se define esta integral impropia de la forma siguiente: $$\int\limits_a^b {f\left( x \right)dx} = \mathop {\lim }\limits_{\delta \searrow 0} \int\limits_a^{{x_o} - \delta } {f\left( x \right)dx} + \mathop {\lim }\limits_{\delta \searrow 0} \int\limits_a^{{x_o} + \delta } {f\left( x \right)dx} $$
Dependiendo del caso se actúa de la siguiente manera:
Caso 1 Se busca $\delta$ cumpliendo $$\left| {\int\limits_a^{a + \delta } {f\left( x \right)dx} } \right| < {\varepsilon \over 2}$$ y luego una aproximación verificando $$\left| {\int\limits_{a + \delta }^b {f\left( x \right)dx} } \right| < {\varepsilon \over 2}$$ Se procede de forma análoga en el caso 2.
Caso 3 Se busca un valor de $\delta > 0$ verificando $$\left| {\int\limits_{{x_o} - \delta }^{{x_o}} {f\left( x \right)dx} } \right| + \left| {\int\limits_{{x_o}}^{{x_o} + \delta } {f\left( x \right)dx} } \right| < {\varepsilon \over 2}$$ Después se buscan aproximaciones de las integrales cumpliendo $$\left| {\int\limits_a^{{x_o} - \delta } {f\left( x \right)dx} } \right| < {\varepsilon \over 4}\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\left| {\int\limits_{{x_o} + \delta }^b {f\left( x \right)dx} } \right| < {\varepsilon \over 4}$$
Ejercicio Calcular $$\int\limits_0^1 {{{\cos \left( x \right)} \over {2\pi \,{\rm{sen}}\left( {\sqrt x } \right)}}dx} $$ considerando $e_a=10^{-12}$.
Octave online
Octave es una alternativa a Matlab con un aspecto y unos comandos y sintasis similares. Se trata de un lenguaje interpretado de alto nivel. Lo puedes descargar desde su página oficial completamente gratis. Aquí tienes el enlace de descarga.
Pero además, puedes utilizar una versión en línea desde tu móvil en el caso de que no tengas a mano tu ordenador. Esta versión la tienes aquí: Octave online.